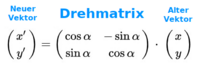
Drehmatrix
Geometrie
© 2016
- 2026
Basiswissen|
Eigenschaften|
Allgemeine Rechenregel|
Zahlenbeispiele zur Vektordrehung|
Ergebnis prüfen mit einer Graphik|
Ergebnis prüfen über einen Längenvergleich|
Verallgemeinerung: Punkte drehen|
Verallgemeinerung: Funktionsggraphen drehen|
Matrix mal Vektor als Grundidee
Basiswissen
In einem 2D-Koordinatensystem, auch als euklidische Ebene ℝ² bezeichnet, kann man einen Ortsvektor mit Hilfe einer Matrix über eine einfache Rechnung um einen gewünschten Winkel α um den Koordinatenursprung (0|0) gegen den Uhrzeigersinn drehen. Man spricht von einer Vektordrehung oder einer Vektorrotation. Die Lösungsidee dazu ist die sogenannte Drehmatrix, oft bezeichnet als R mit einem rechts tiefgestellten kleinen Alpha. Hier ist der Rechenweg in Worten und mit Zahlenbeispielen erklärt.
Eigenschaften
- Eine Drehmatrix ist immer eine 👉 quadratische Matrix
- Jeder Eintrag ist immer nur eine 👉 reelle Zahl
- Die Determinante ist immer 1, siehe 👉 Determinante
- Die Drehmatrix ist immer auch eine 👉 orthogonale Matrix
- Es gilt immer: transponierte Matrix gleich 👉 inverse Matrix
- Erhält immer das 👉 Skalarprodukt [ändert es nicht]
Allgemeine Rechenregel
Sind x und y die Koordinaten des gegebenen Vektors, dann kann man die Koordinaten x' und b' des um α nach links gedrehten Vektors mit der folgenden Rechnung bestimmen:
- x' = x·cos(α) - y·sin(α)
- y' = x·sin(α) + y·cos(α)
Zahlenbeispiele zur Vektordrehung
- (2 0) um 90° nach links gedreht gibt (0 2)
- (2 0) um 45° nach links gedreht gibt (2/√2 2/√2)
- (2 4) um 45° nach links gedreht gibt (-2/√2 6/√2)
Ergebnis prüfen mit einer Graphik
Ob die Rechnung das korrekte Ergebnis lieferte kann man in zweidimensionalen Koordinatensystemen schnell mit einer Skizze überprüfen. Der Anfangs- und der Ergebnisvektor beginnen beide im Koordinatenursprung. Die Vektorkoordinaten führen dann zur Spitze des Punktes. Beide Vektoren deutet man also als je einen 👉 Ortsvektor
Ergebnis prüfen über einen Längenvergleich
Als notwendige (aber nicht hinreichende) Bedingung für die Korrektheit des Ergebnisses kann man auch prüfen, ob der alte und der neue Vektor - bis auf kleine Rundungsunterschiede - dieselbe Länge haben. Nur wenn sie dieselbe Länge haben, kann die Rechnung stimmen. Um die Länge eines zu berechnen, quadriert man jede Zahl des Vektors, addiert alle diesen Zahlen auf und zieht am Ende aus der Summe die Wurzel. Das Ergebnis ist dann die gesuchte 👉 Vektorlänge
Verallgemeinerung: Punkte drehen
Fasst man den gedreht Vektor als Ortsvektor auf, dann ist die Drehung dieses Ortsvektors um den Koordinatenursprung geometrisch gleichbebeutend mit einer Drehung des Punktes der Vektorspitze um den Koordinatenursprung. Siehe dazu den Artikel 👉 Punkt drehen
Verallgemeinerung: Funktionsggraphen drehen
Wendet man gedanklich die Drehmatrix auf alle Punkte eines Funktionsgraphen an, dann kann man darüber den Graphen um jeden gewünschten Winkel α nach links um den Koordinatenursprung drehen. Das ist erklärt auf der Seite
Matrix mal Vektor als Grundidee
Die hier formelmäßig dargestellte Rechnung ist eine Umsetzung der Rechnung der Drehmatrix mal dem Ausgangsvektors. Wie man ganz allgemein eine Matrix mit einem Vektor multipliziert ist erklärt auf der Seite 👉 Matrix mal Vektor